 Tiếng Việt
Tiếng Việt English
English





PHƯƠNG PHÁP ĐIỀU KHIỂN TRỰC TIẾP MOMENT TRÊN BIẾN TẦN ABB (DTC – DIRECT TORQUE CONTROL)
I. Khái niệm biến tần
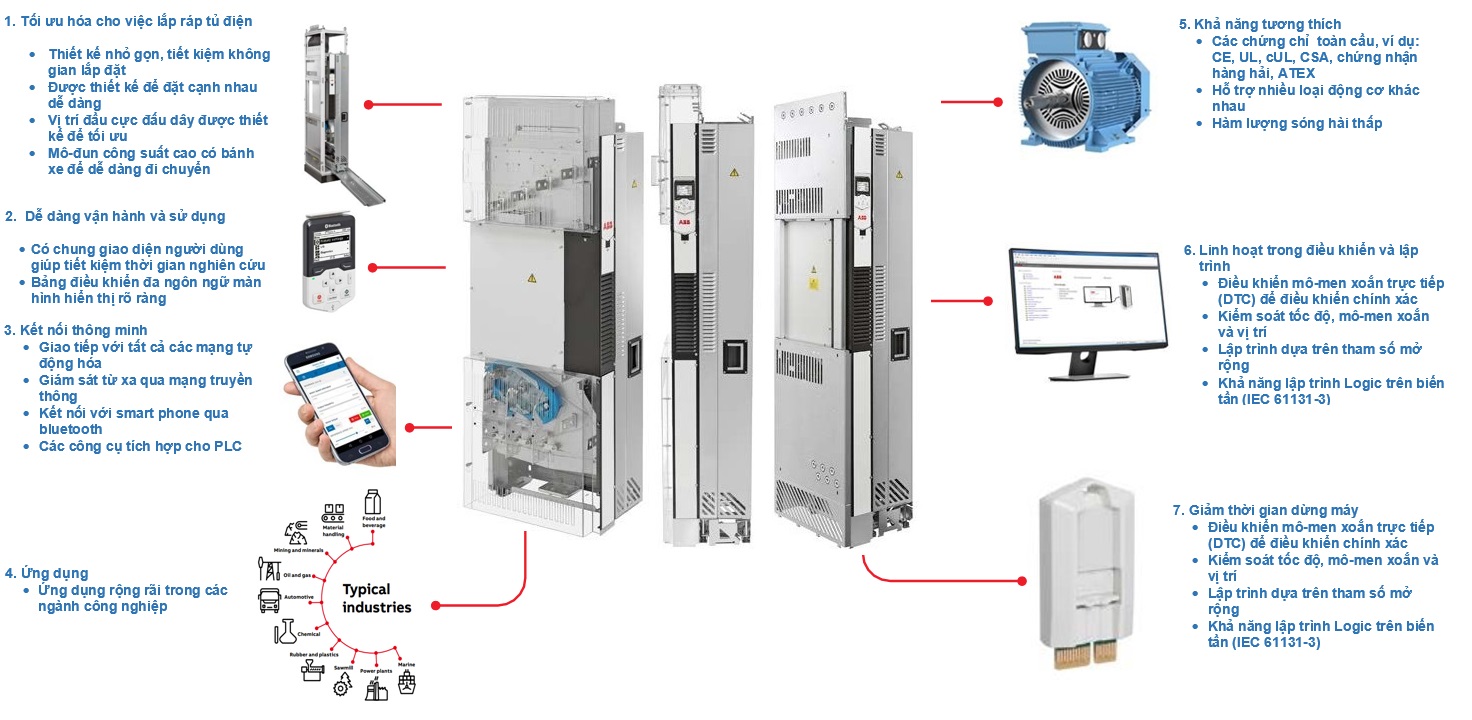
Biến tần là thiết bị được ứng dụng rất rộng rãi trong hầu hết các ngành công nghiệp. Dựa trên cấu tạo cơ bản của biến tần, gồm 3 phần chính: chỉnh lưu, lọc và nghịch lưu. Trong đó phần quan trọng nhất, phần đóng vai trò trái tim của biến tần và cũng là phần có cấu tạo phức tạp nhất chính là phần nghịch lưu (inverter).

Cho đến nay, đã có nhiều lý thuyết xoay quanh vấn đề các vấn đề điều khiển cho biến tần, như điều khiển theo luật điện áp/tần số (U/f), điều khiển theo từ trường (FOC – Field Oriented Control) và điều khiển trực tiếp momen (DTC – direct torque control). Đồng thời với sự phát triển của các thiết bị điện tử công suất và kỹ thuật xử lý tín hiệu số nên đã có nhiều loại bộ điều khiển động cơ không đồng bộ có chất lượng cao ra đời.
II. Phương pháp điều khiển trực tiếp moment (DTC)
Tư tưởng chính của phương pháp là: Tạo xung kích thích van trực tiếp trên cơ sở sai lệch từ thông Stator và sai lệch mômen quay. DTC sử dụng dải trễ để điều khiển trực tiếp từ thông và mômen của máy điện. Khi từ thông Stator rơi ra ngoài dải trễ, vectơ chuyển mạch thay đổi để từ thông là tối ưu (đạt giá trị đặt).
Bộ điều khiển DTC gồm 2 khối chính: điều khiển moment xoắn và điều khiển tốc độ
a. Khối điều khiển moment xoắn

- Bước 1: Đo dòng điện và điện áp 2 pha đầu ra của biến tần, cùng với điện áp DC.
- Bước 2: Mô hình hóa động cơ. Từ những thông tin thu thập được ở bước 1, bộ điều khiển sẽ tự động đưa ra 1 mô hình động cơ với đầy đủ các thông số.
- Bước 3: So sánh từ thông và moment xoắn thực tế với mô hình với chu kỳ 25 micro giây.
- Bước 4: Tối ưu hóa xung điều khiển: chọn ra xung điều khiển chính xác nhất cho bộ điều khiển.
b. Khối điều khiển tốc độ

- Bước 5: Bộ điều khiển moment xoắn tham chiếu. Tốc độ đầu ra bị giới hạn bởi moment xoắn và điện áp DC bus.
- Bước 6: Bộ điều khiển tốc độ gồm bộ điều khiển PID và bộ bù gia tốc. tốc độ tham chiếu được so sánh với tốc độ thực tế trong động cơ mô hình rồi đưa vào bộ điều khiển tốc độ.
- Bước 7: Bộ điều khiển từ thông: đưa giá trị tuyệt đối của từ thông stato đến bộ so sánh từ thông.
III. Ưu điểm của phương pháp điều khiển moment trực tiếp
- Đáp ứng mô-men xoắn nhanh: làm giảm đáng kể thời gian, mang lại nhiều cải thiện trong quá trình kiểm tra, theo dõi thiết bị, sản phẩm.
- Điều khiển mô-men xoắn ở tần số thấp: Điều này đặc biệt có lợi cho cần cẩu hoặc thang máy, trong đó tải cần phải bắt đầu và dừng lại thường xuyên mà không có bất kỳ giật đột ngột. Hoặc trong máy cuộn dây, kiểm soát lực căng có thể đạt được từ 0 đến đến tốc độ tối đa.
- So với các biến tần dùng phương pháp PWM, DTC mang lại lợi ích tiết kiệm chi phí mà không cần máy đo tốc độ động cơ.
- Tuyến tính mô-men xoắn: Điều này rất quan trọng trong các ứng dụng chính xác giống như cuộn dây, được sử dụng trong ngành giấy.
Độ chính xác tốc độ động: Sau khi thay đổi tải đột ngột, động cơ có thể phục hồi đến trạng thái ổn định nhanh hơn.
Bài viết liên quan
-

DỊCH VỤ BẢO DƯỠNG BIẾN TẦN TẠI NHÀ MÁY
-

LỢI ÍCH, CẤU TẠO VÀ ỨNG DỤNG CỦA BIẾN TẦN ACS 580
-
SO SÁNH SỰ KHÁC NHAU GIỮA BIẾN TẦN VÀ KHỞI ĐỘNG MỀM
-
CÁC LỖI THƯỜNG GẶP CỦA BIẾN TẦN ABB VÀ CÁC CÁCH KHẮC PHỤC
-
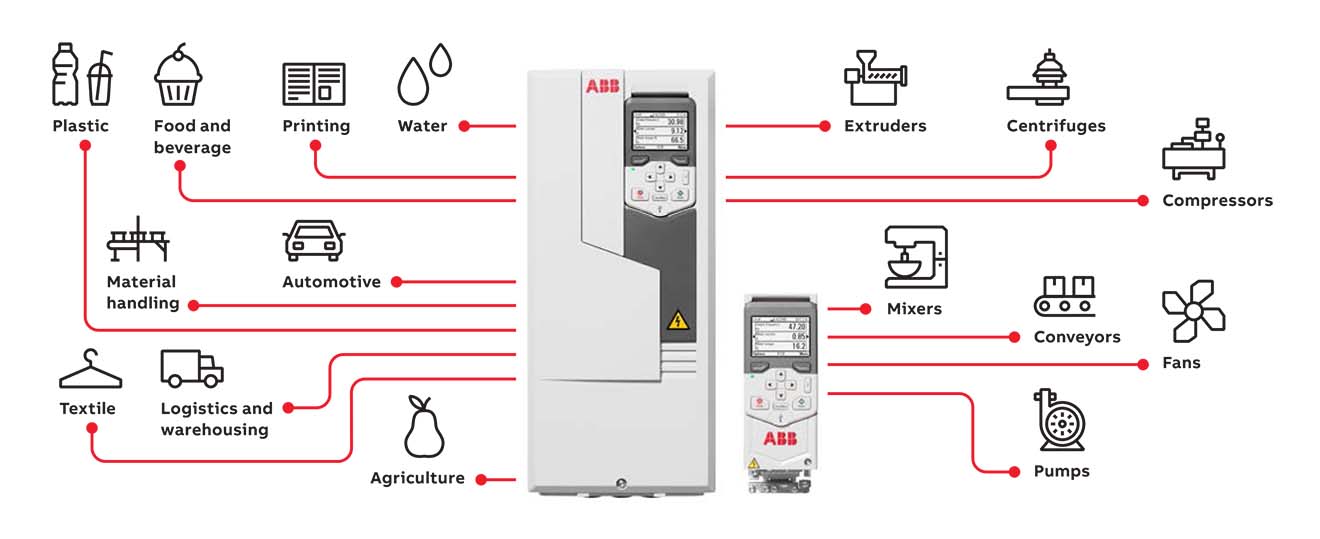
CÁC ỨNG DỤNG CỦA BIẾN TẦN
-
Giới thiệu biến tần ABB dạng mô-đun
-

GIỚI THIỆU DÒNG BIẾN TẦN MỚI ACS480
-

BẢO TRÌ - BẢO DƯỠNG BIẾN TẦN AN TOÀN VÀ HIỆU QUẢ NHẤT
-

BẢOTRÌ, BẢO DƯỠNG ĐIỀU HÒA TỦ ĐIỆN
-

GIẢI PHÁP TIẾT KIỆM NĂNG LƯỢNG CHO MÁY NÉN KHÍ


